Golem: Bipedal Walking Robot
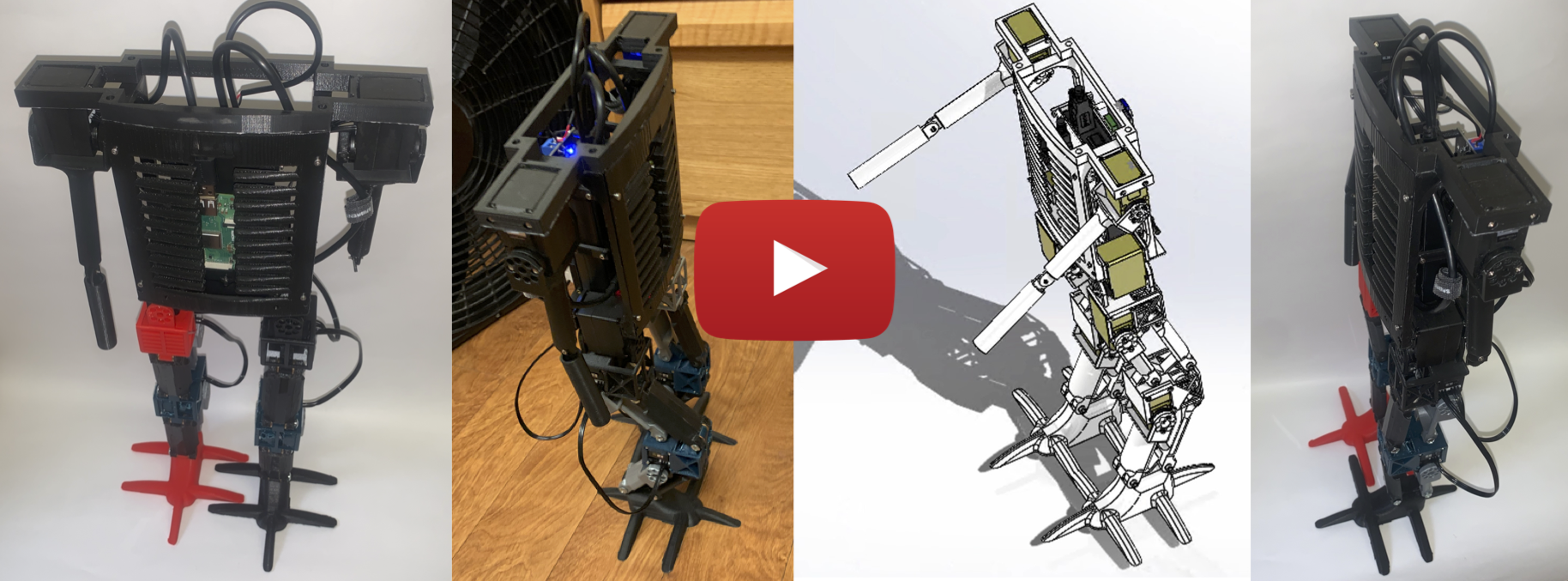
As a student in the Columbia University class Robotics Studio (taught by Professor Hod Lipson), I used Solidworks to design a bipedal walking robot I named Golem. I then 3D printed the parts for the robot, assembled them, and used a Raspberry Pi connected to 8 servomotors, a battery, and a controller to program the robot to walk. Please click on the video above for a more detailed look at my design process.